Sesiones
Sesión de comunicación
Note
Este código puede ser usado para probar el Bluetooth de tu robot. (sesión 25 de mayo)
#include <SoftwareSerial.h>
SoftwareSerial ble(8,9);
int in1 = 4;
int in2 = 5;
int in3 = 6;
int in4 = 7;
void setup() {
// Motores
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
// Sistema de comunicación
Serial.begin(9600);
ble.begin(9600);
}
void loop() {
if (ble.available()) {
// Pruebas Teleoperado
char car = ble.read();
Serial.println(car);
if (car == 'A')
adelante();
else if (car == 'T')
atras();
else
alto();
}
}
void atras()
{
digitalWrite(in1,HIGH);
digitalWrite(in2,LOW);
digitalWrite(in3,HIGH);
digitalWrite(in4,LOW);
}
void adelante()
{
digitalWrite(in1,LOW);
digitalWrite(in2,HIGH);
digitalWrite(in3,LOW);
digitalWrite(in4,HIGH);
}
void alto()
{
digitalWrite(in1,LOW);
digitalWrite(in2,LOW);
digitalWrite(in3,LOW);
digitalWrite(in4,LOW);
}
Retos
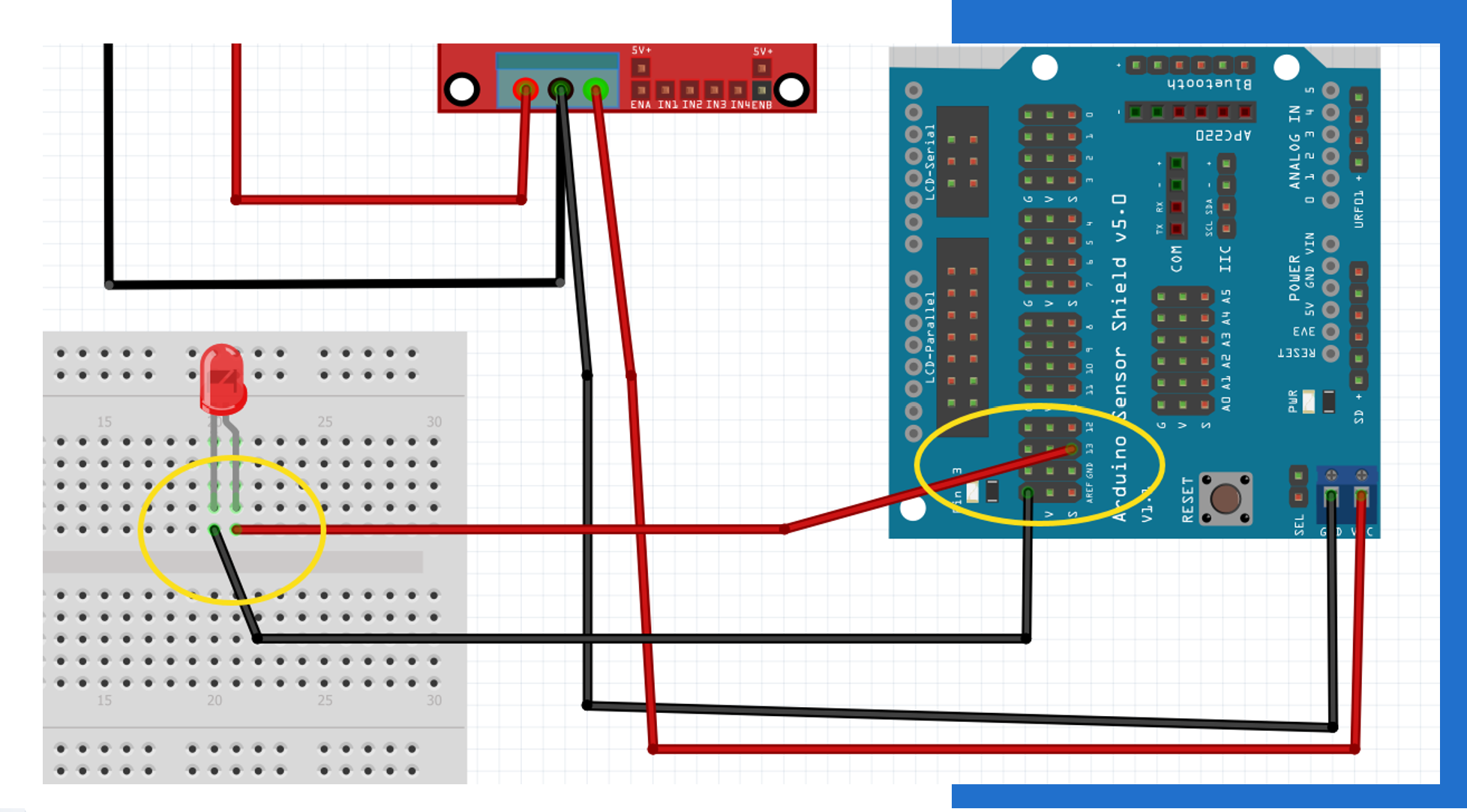
Circuito de prueba con un LED
void setup() {
pinMode(13, OUTPUT);
Serial.begin(9600);
}
void loop() {
digitalWrite(13, HIGH); // prende el LED
delay (1000);
digitalWrite(13,LOW); // apaga el LED
delay (1000);
}
Ultrasónico con LED
void setup() {
pinMode(2, INPUT); // ECHO
pinMode(3, OUTPUT); // TRIGGER
pinMode(11, OUTPUT);
pinMode(12, INPUT_PULLUP);
pinMode(13, OUTPUT);
Serial.begin(9600);
}
// the loop function runs over and over again forever
void loop() {
int boton = digitalRead(12);
float d = ultra();
if (boton == LOW || (d > 0 && d < 8)) // Si se presiona el botón o hay algo a menos de 8cm
{
digitalWrite(11, HIGH);
digitalWrite(13, HIGH); // prende el LED
}
else
{
digitalWrite(11, LOW);
digitalWrite(13,LOW); // apaga el LED
}
}
// Función que "empaqueta" la funcionalidad del sensor ultrasónico
// Declara los puertos de trigger y echo, así como las variables de retorno
float ultra()
{
int trigger = 3; //Pin digital 2 para el Trigger del sensor
int echo = 2; //Pin digital 3 para el Echo del sensort
float tiempo_de_espera,distancia;
digitalWrite (trigger,LOW); // ponemos en bajo el pin 8 durante 2 microsegundos
delayMicroseconds(2);
digitalWrite (trigger, HIGH); // ahora ponemos en alto pin 8 durante 10 microsegundos;
delayMicroseconds (10); // pues este el momento en que emite el sonido durante 10 segungos
digitalWrite (trigger, LOW); // ahora ponemos en bajo pin 8
tiempo_de_espera = pulseIn(echo,HIGH); // pulseIn, recoge la señal del sonido que emite el trigger
distancia =(tiempo_de_espera/2)/29.15; // formula para hallar la distancia
serial.print (distancia); // imprimimos la distancia en cm
Serial.println ("cm");
return distancia;
}